简介
本文《GAMES101-现代计算机图形学入门》系列教程的课程笔记,仅用于个人学习使用。
屏幕
当进行完 MVP 变换之后,所有需要绘制的点都变换到 $ [-1, 1]^3 $ 的立方体空间中了。
下一步工作就是要把结果绘制到屏幕上,在这之前先了解一下什么是屏幕。
屏幕由一系列的像素(Pixel,是 Picture element 的缩写)排布形成,像素的数量由分辨率决定,如分辨率是 1920 x 1080 的屏幕,就包含了 1920 x 1080 个像素。
每个像素表示的颜色由红(red)、绿(green)、蓝(blue)三种颜色混合而成。
屏幕空间
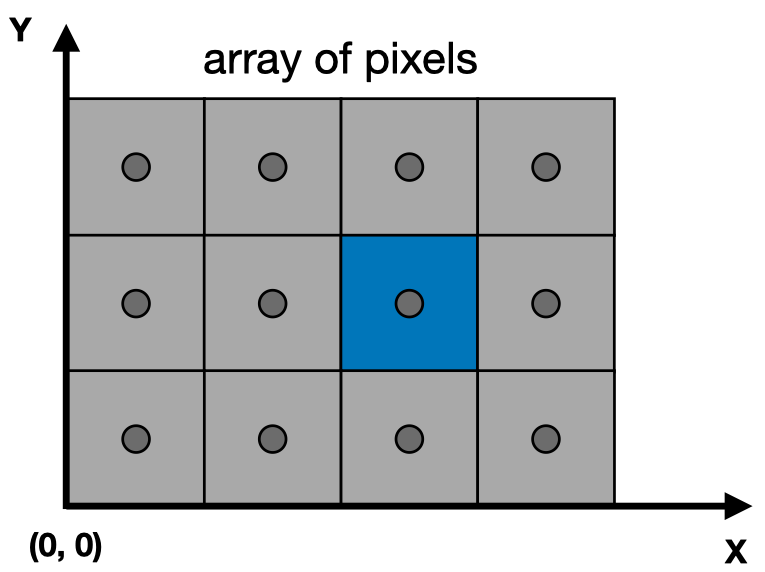
屏幕空间是在屏幕上建立一个坐标系,原点位于屏幕的左下角,+X 向右,+Y 向上。
每个像素以 $ (x, y) $ 的形式来表示(这个坐标表示的是像素的左下角的位置):
- x 的取值范围是 $ [0, width - 1] $
- y 的取值范围是 $ [0, height - 1] $
如上图的蓝色的像素的位置就是 $ (2,1) $。
另外,我们还要确定每个像素的中心,由于像素的宽高都是 1,因此我们很容易知道每个像素的中心位于 $ (x + 0.5, y + 0.5) $ 的位置上。
要绘制立方体空间,我们首先要把立方体空间变换成屏幕空间中。屏幕没有 Z 方向,所以我们实际上要做的是把立方体空间中的 XY 平面对应 $ [-1, 1]^2 $ 的空间变换成屏幕空间。换句话说,只是把 $ [-1, 1]^2 $ 变换成 $ [0, width] x [0, height] $ 的空间。只需要经过如下的步骤即可实现:
- 对 $ [-1, 1]^2 $ 进行一次缩放,铺满屏幕
- 平移空间,使空间的左下角位于原点坐标(缩放后的空间的左下角在 $ (-\frac {width} 2, -\frac {height} 2) $)
因此,这个变换就是:
$$
\begin{bmatrix}
\frac {width} 2 & 0 & 0 & \frac {width} 2 \\\
0 & \frac {height} 2 & 0 & \frac {height} 2 \\\
0 & 0 & 1 & 0 \\\
0 & 0 & 0 & 1
\end{bmatrix}
$$
三角形
三角形在图形学中应用非常广泛,相比其他图形,它拥有如下性质:
- 复杂图形都能通过三角形组合来表示
- 在空间中的任意三角形的三个顶点都在同一个平面内
- 能很清晰的定义出三角形的内部和外部
- 很容易计算出一个点是位于三角形内部还是外部(通过叉乘)
- 只要定义出三角形的三个顶点的属性,那三角形内部的任意一点都能通过插值的方式计算出对应的属性(通过重心坐标进行插值)
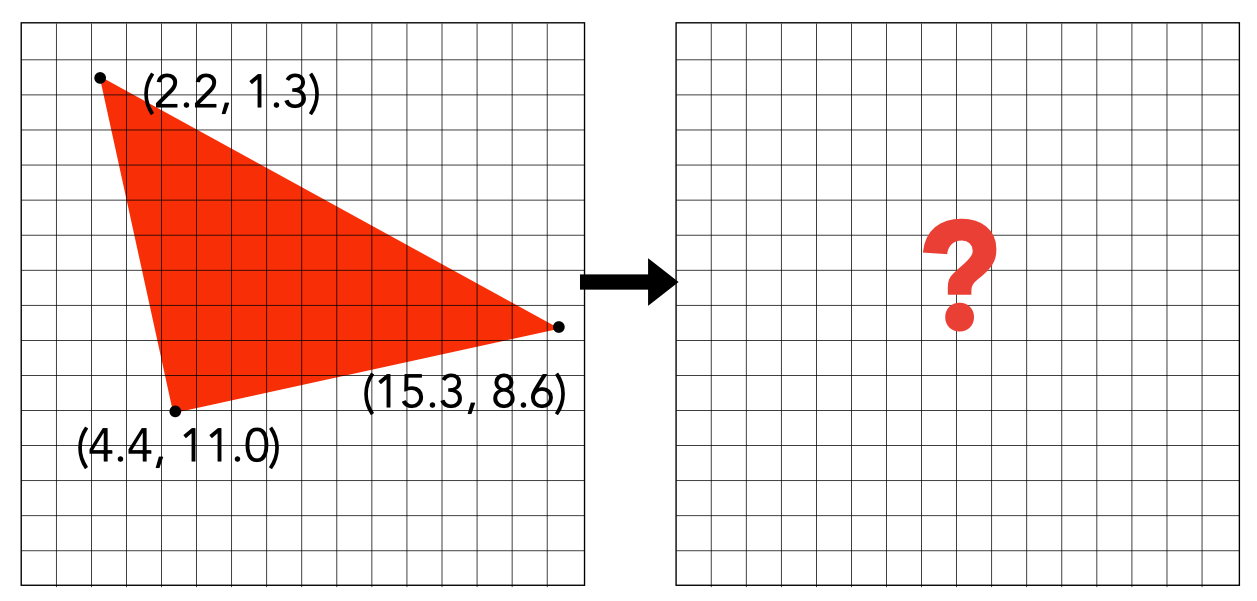
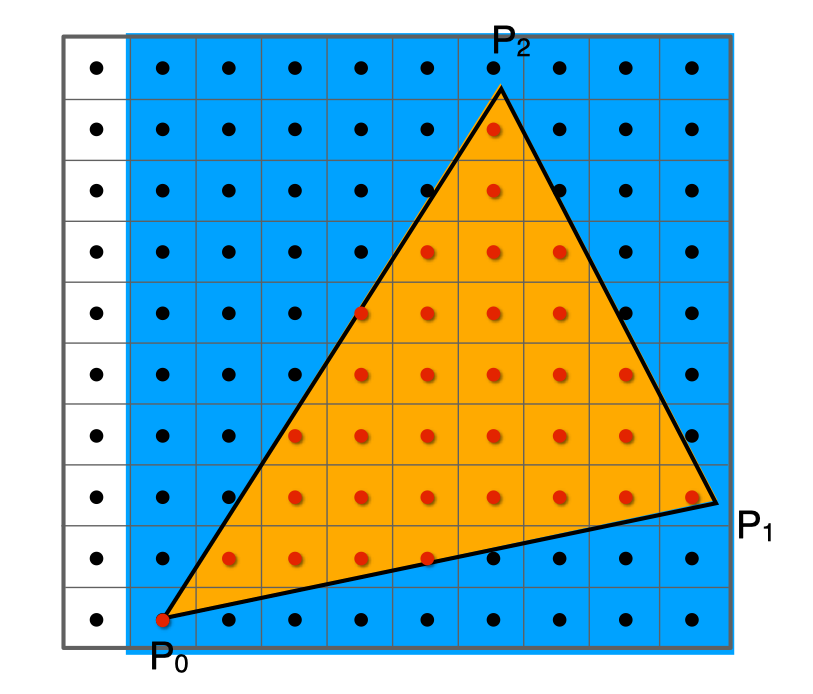
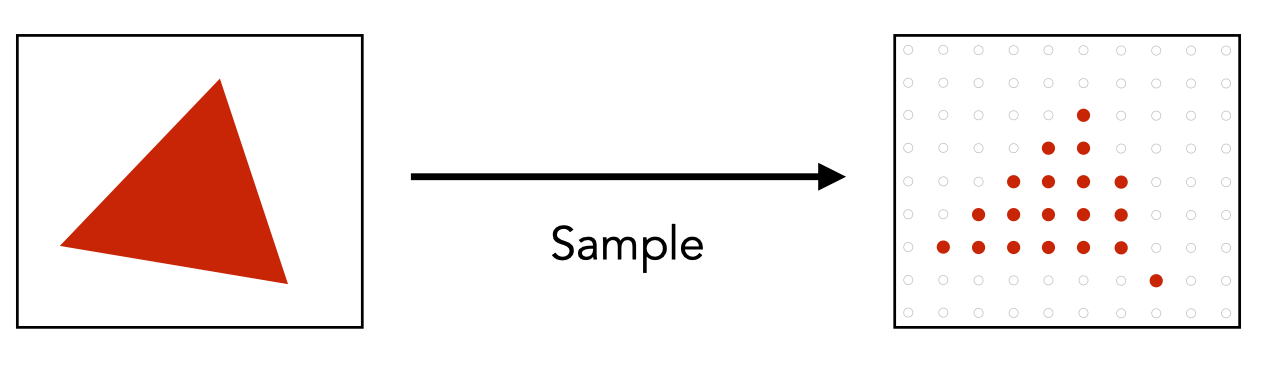
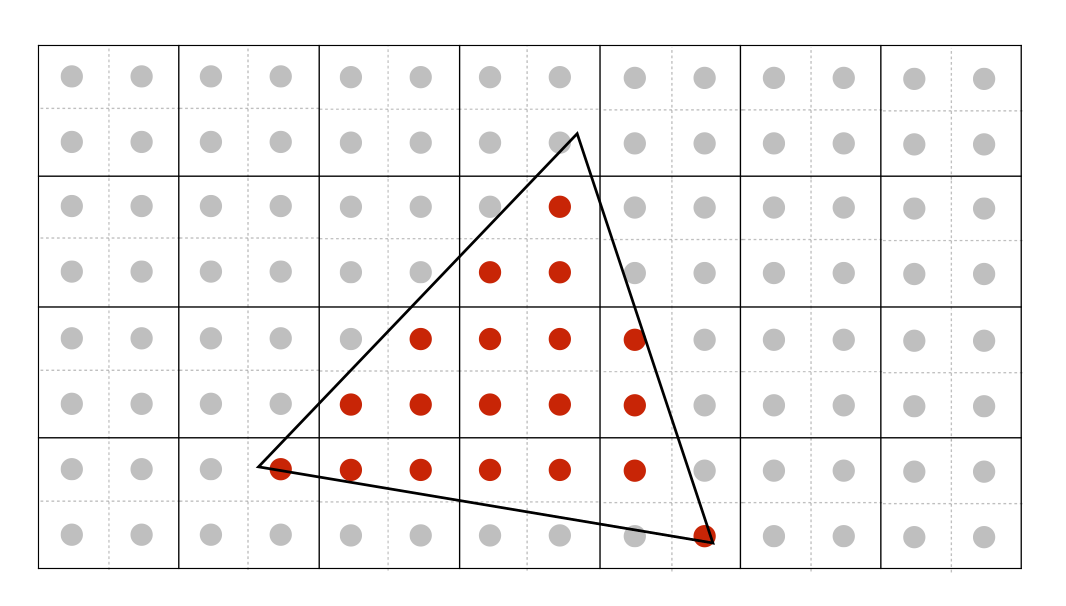
当我们知道了三角形三个顶点的坐标之后,下一步就是决定哪些像素应该被填充了。
如上图所示,三角形内部大部分像素都是被覆盖了的,但边缘位置的像素只是覆盖了一部分,那么应该怎么填充呢?
这就是在光栅化中最重要的概念:判断一个像素和三角形的位置关系,更确切来说,是判断一个像素中心点与三角形的位置关系。
采样
我们可以通过采样的方式来判断是否应该填充像素。首先要介绍下什么是采样:
采样是把函数离散化的过程。
简单来说就是:给定一个连续函数 $ f(x) $,然后通过一系列的参数如 1、2、3不断代入 $ f(x) $,求出 $ f(1), f(2), f(3) $,这样我们就得到了三个离散的点。这个过程就是在采样了,转换成代码就是:
1
2
3
|
for (int x = 0; x < xmax; ++x) {
output[x] = f(x);
}
|
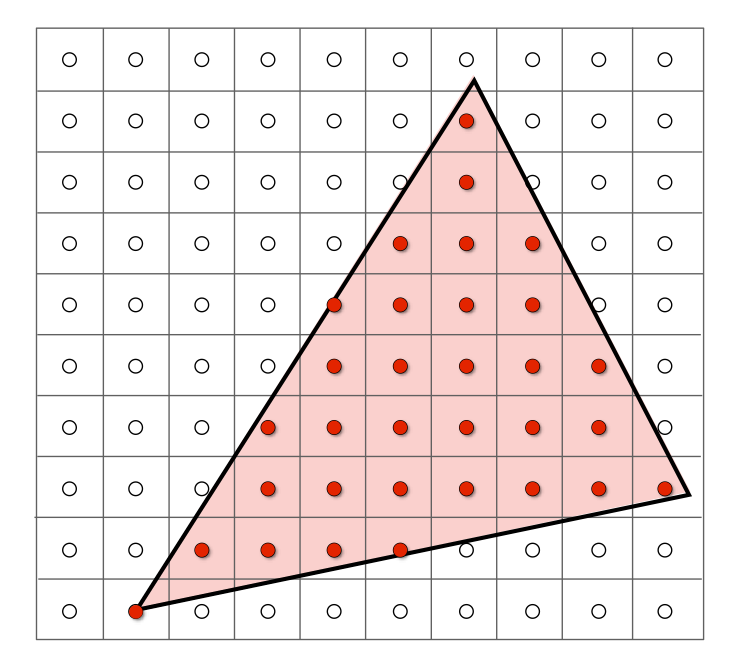
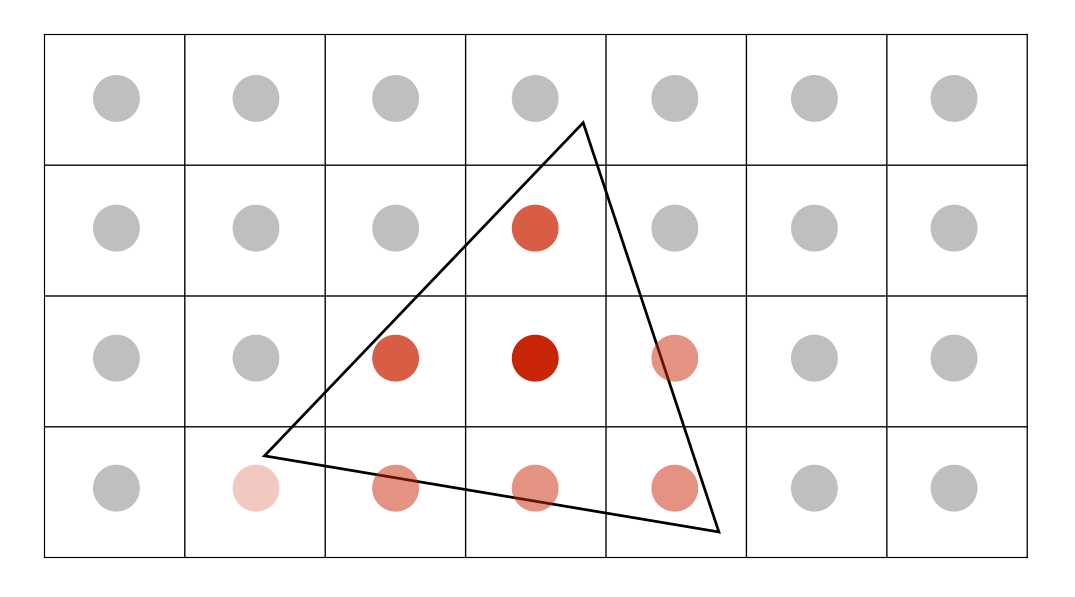
类似的,我们可以通过像素中心对屏幕空间进行采样,判断该像素中心是否被三角形覆盖,以此来判断该像素应不应该被填充。
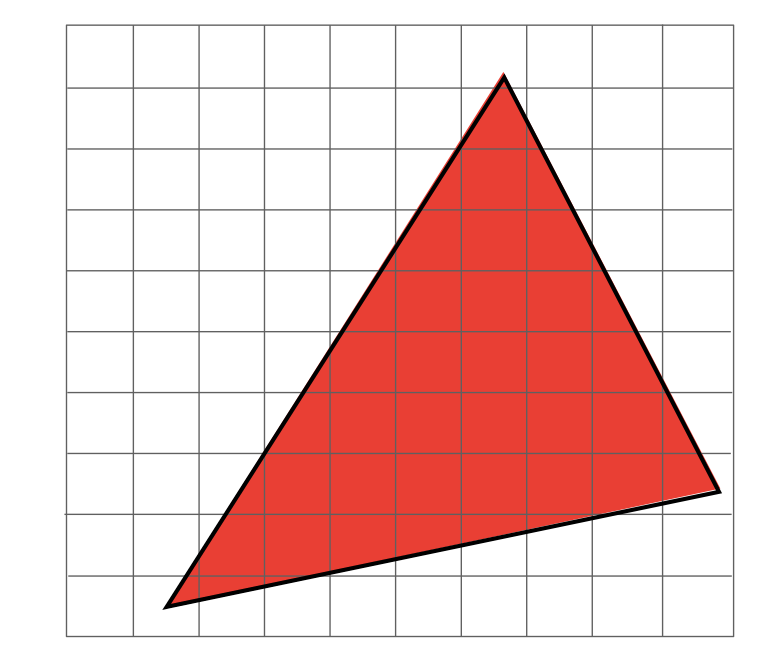
如上图所示的三角形,我们给出一个采样函数:
$$
inside(triangle, x, y) =
\begin{equation}
\left\{
\begin{array}{lr}
1, 当像素中心位于三角形内部时 \\
0, 否则
\end{array}
\right.
\end{equation}
$$
如何判断像素中心是否位于三角形内部呢?之前提到过可以利用叉乘的结果来判断,我们来回忆一下:
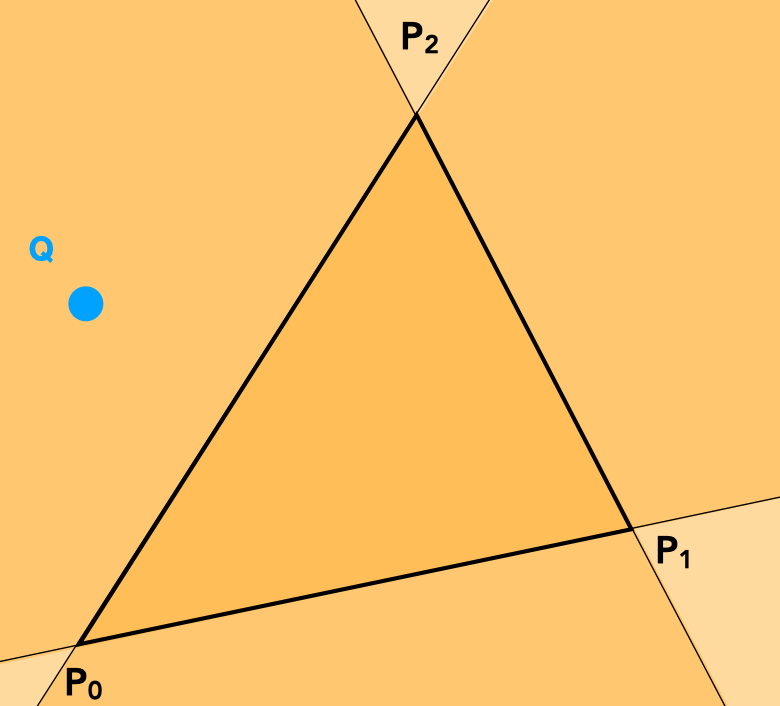
假设三角形的三个顶点分别是 $ P_0,P_1,P_2 $,并且三角形是以逆时针的顺序进行绘制的。那么我们可以求出:
$$
\vec {P_0 P_1} \times \vec {P_0 Q} \\\
\vec {P_1 P_2} \times \vec {P_1 Q} \\\
\vec {P_2 P_0} \times \vec {P_2 Q} \\\
$$
根据右手螺旋定则,当得到的三个向量同时为朝外或者同时朝内时,该点会位于三角形内部。
有了采样函数后,我们再对每个像素进行一次采样:
1
2
3
|
for (int x = 0; x < width; ++x)
for (int y = 0; y < height; ++y)
image[x][y] = inside(triangle, x + 0.5, y + 0.5)
|
然而,如果对每个三角形都进行全屏幕采样的话,性能就非常浪费了。
实际上,我们只需要对三角形所在的轴向包围盒子(Axis Align Bounding Box,简称 AABB)覆盖的范围进行采样即可:
但在极端情况下,例如三角形进行过旋转,或者三角形非常扁,AABB 就会偏大,采样时也会造成浪费。
采样完成后,然后我们就能得到如下的结果:
最后,我们对像素进行填充:
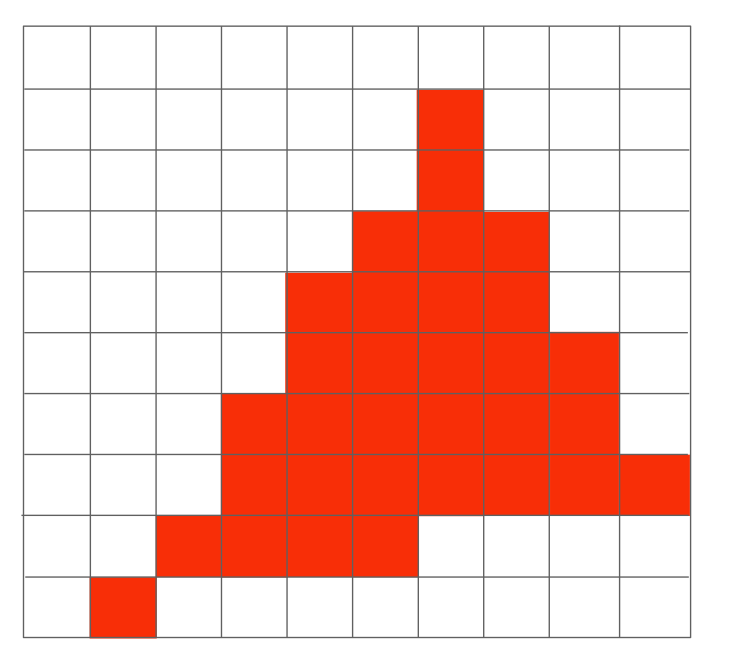
得到了一个不太正常的结果,但理论上我们所有的步骤都是正确的,为什么会得到一个充满锯齿的三角形呢?
采样理论
在了解锯齿之前,我们先来了解一下什么是采样。 在图形学中,采样是无处不在的。
如光栅化相当于对屏幕中的二维点进行采样、录像相当于对时间进行采样。
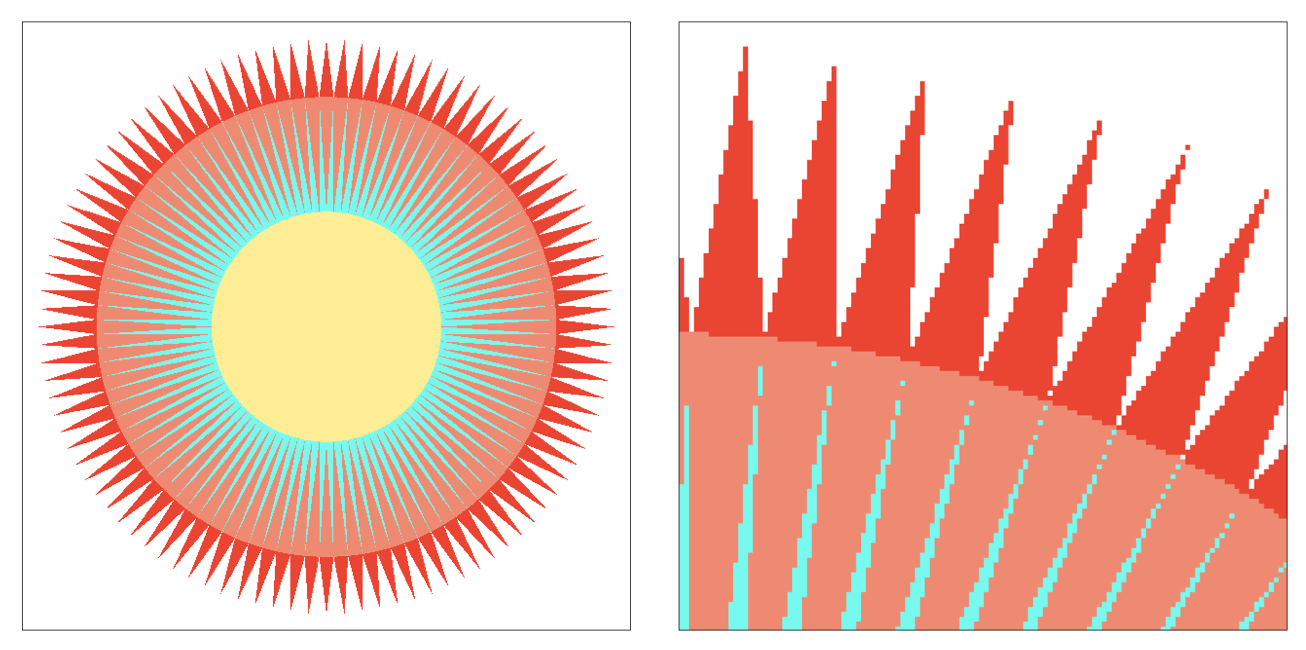
在采样过程中,当出现一些不正确的现象时,我们会把这些现象称为走样(Aliasing)。常见的有:
- 摩尔纹(把左图的奇数行列去掉之后,再缩放到原图尺寸就会得到右图)

发生这些现象的本质原因是 信号频率太快,但采样频率太慢。
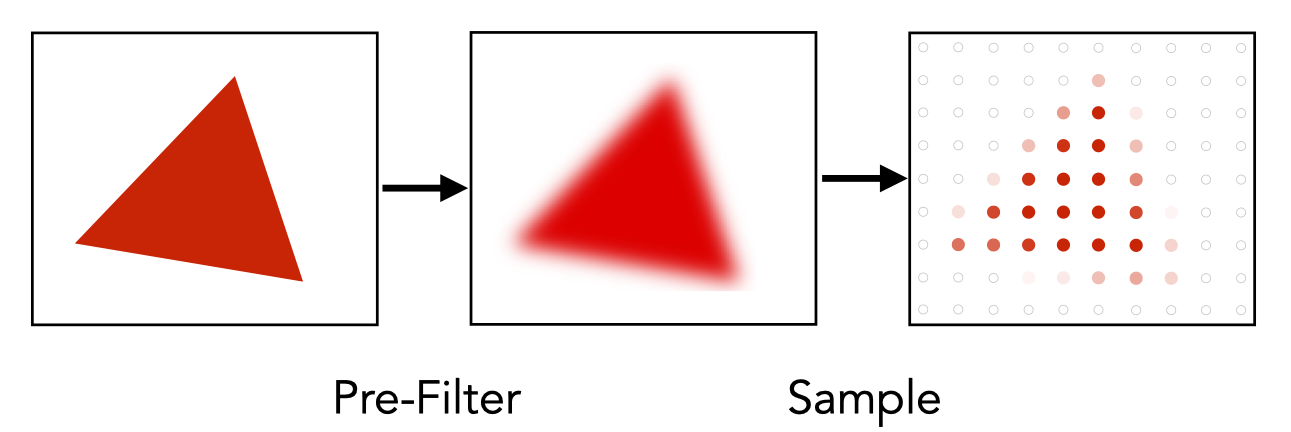
要解决上面提到的锯齿现象,我们可以先对原图进行一次模糊处理,然后再进行采样:
但为什么先进行模糊再采样就能达到抗锯齿的效果呢?
对于一个连续的函数(信号),我们是通过采样来「还原」原来的函数(信号)的。
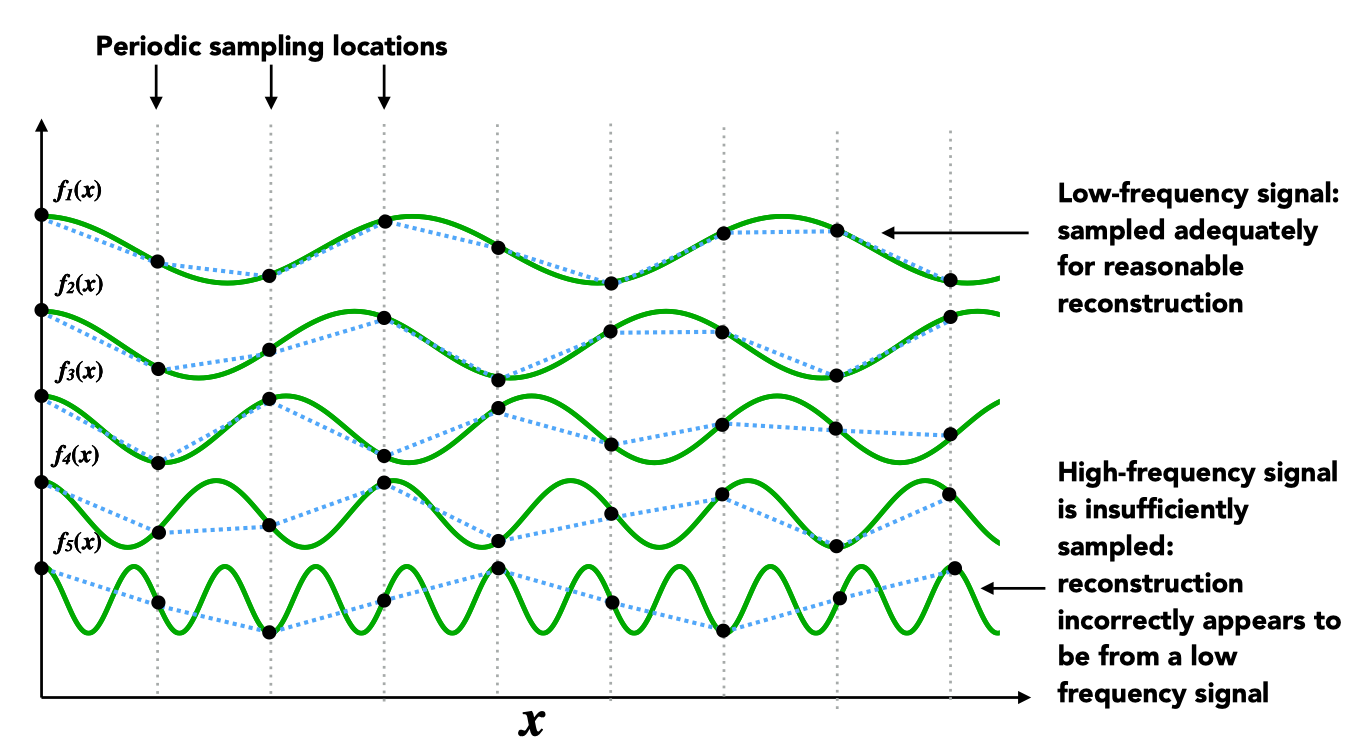
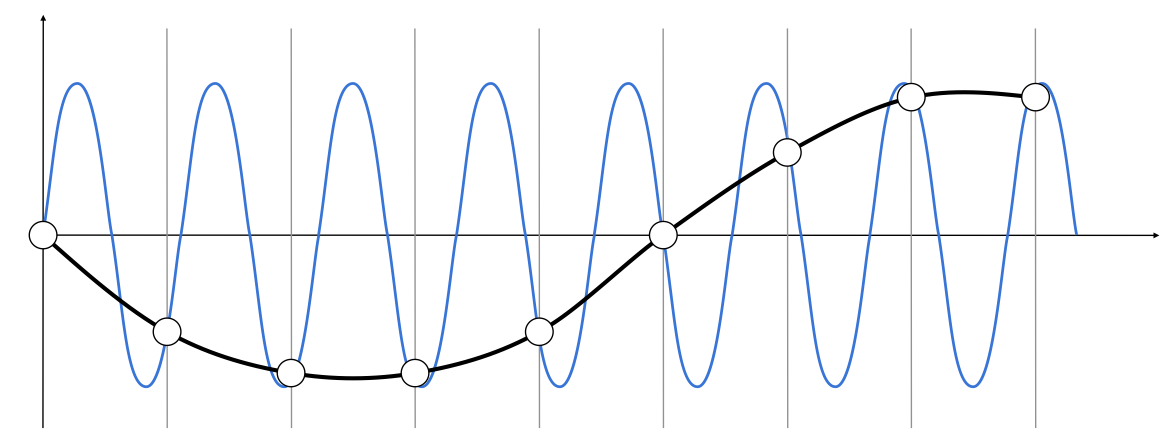
在上图中,有 5 个连续的函数,从 $ f_1 $ 到 $ f_5 $ 的频率渐渐变高。
竖直的虚线表示采样频率。在相同采样频率下,我们对这些函数进行采样,然后把采样后的点连线。 细心观察可以发现:
- 频率越低的函数,采样后的连线与原函数差异越小
- 频率越高的函数,采样后的连线与原函数差异越大
再观察一个极端的例子:
上图对两个函数进行采样,蓝色的是高频函数,黑色的是低频函数。对高频函数采样后的结果(得到的是低频函数)会与低频函数采样结果(得到的是相同的低频函数)一致。
这个例子充分说明:用同一种采样方法,对两个截然不同的信号进行采样,我们可能会得到相同的结果。这就是我们经常说的 —— 走样(alias)。
抗锯齿
锯齿的产生是由于采样率不足,那么我们可以通过以下方式来进行抗锯齿:
这是一种终极解决办法,如把 640x480 分辨率的屏幕换成 1920x1080 分辨率的屏幕,像素变小了,相当于提高了采样率,但这并不现实,我们需要的是在同一块屏幕下实现抗锯齿的方法。
从上面的例子可以知道,我们可以先对图像进行一次模糊操作,再进行采样就可以实现抗锯齿。
在频率上,这种操作相当于先用低通滤波把高频信息过滤掉,再进行采样。这里用的低通滤波就是利用卷积求出当前像素和周围像素的平均值。
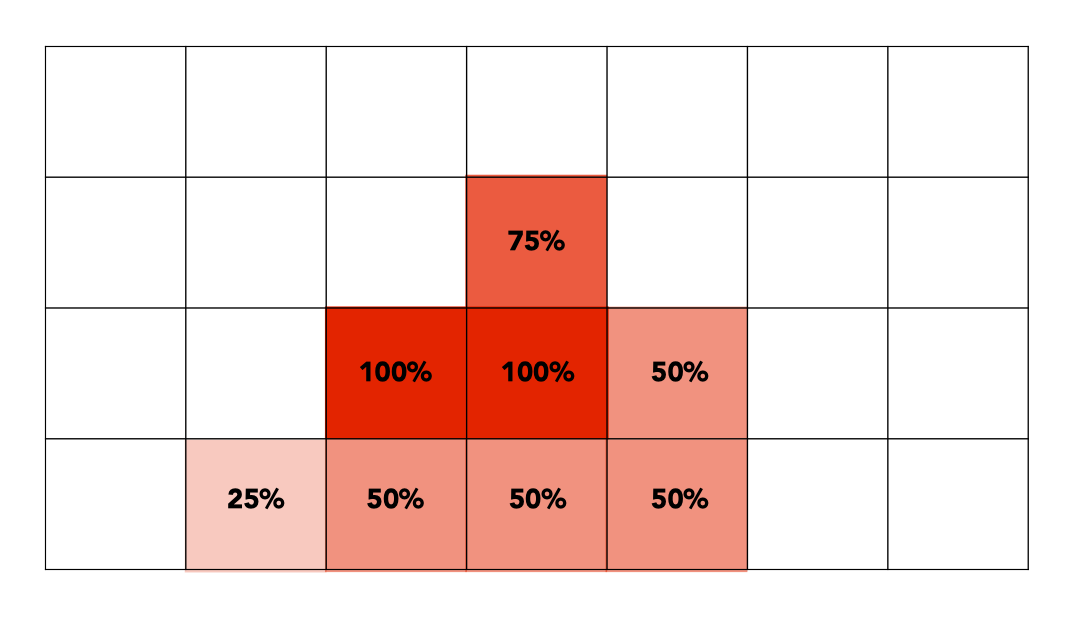
对于同一个像素,我们知道它原来有多少地方被覆盖了,这时候如果可以先算出覆盖比例,那么我们就可以根据这个比例对像素进行填充了。
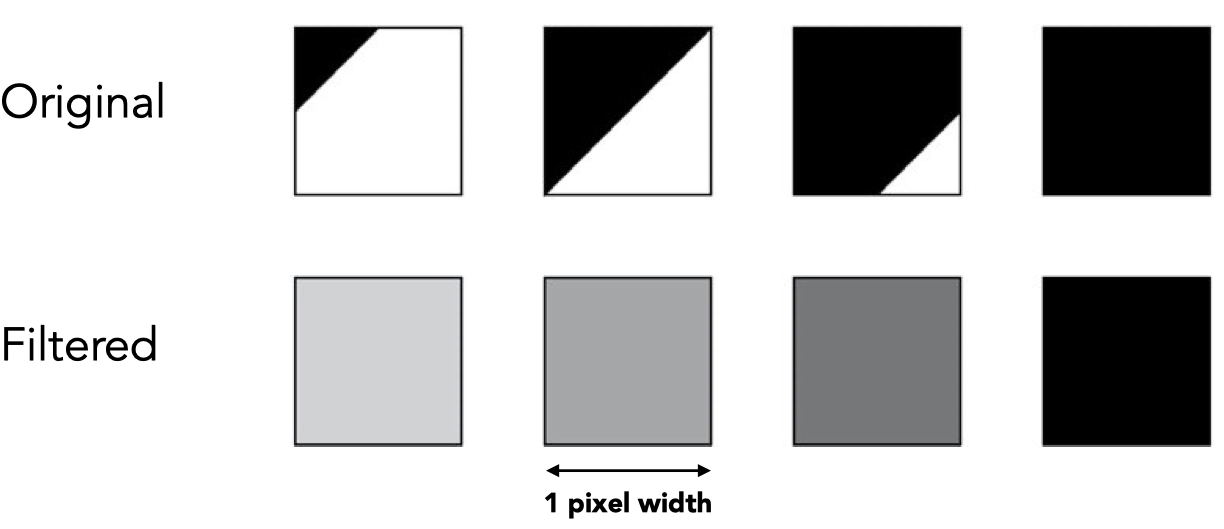
如上图所示:我们可以用肉眼看出四个像素分别被覆盖了 12.5%、50%、87.5%、100%,但屏幕在填充像素是不能只填充一部分的,只能填充一整个像素。因此这时候可以对该像素进行一次平均,最后得到像素的颜色。
超采样 (MSAA)
事实上,刚刚提到的计算像素覆盖面积的做法是很难实现的。但我们可以通过超采样的方式来模拟。
所谓的超采样,是指在一个像素里面放多个采样点来检测三角形是否有被覆盖。
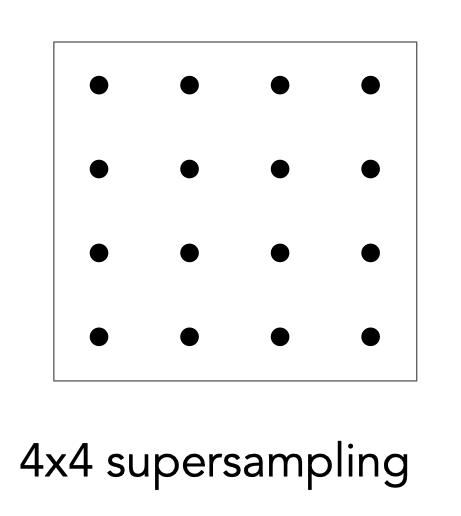
上图表示一个像素里面包含了 16 个采样点,每个采样点采样后再把结果平均起来,最后就能得到三角形对该像素覆盖程度的近似值。
如果想要更准确的近似值的话,可以用更多的采样点,但这样计算量就会更大了。
接下来看看实际例子:
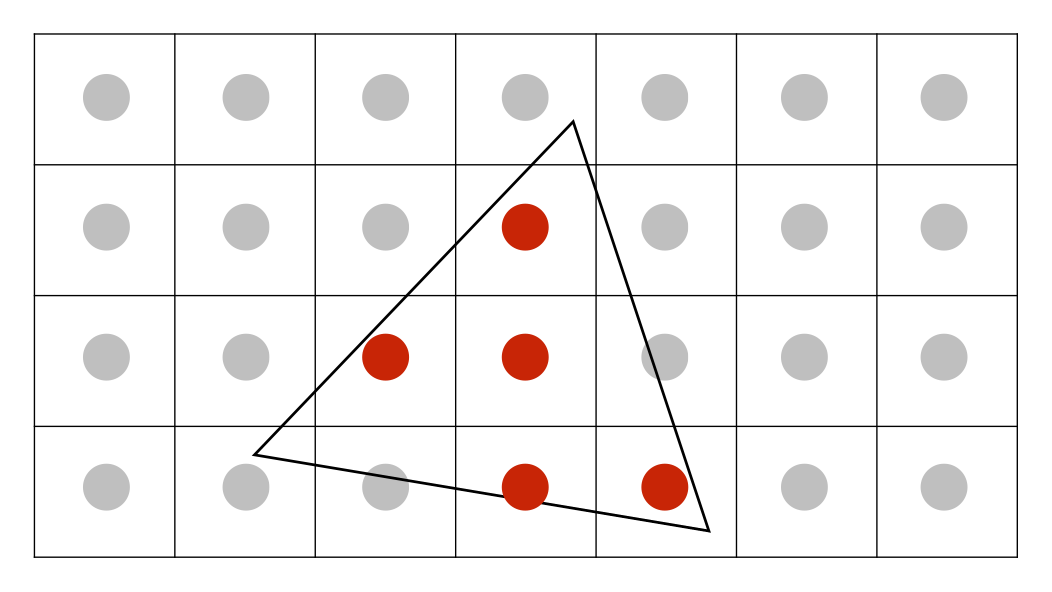
上图中一个像素里面只有一个采样点。
超采样的第一步是要为每个像素增加采样点(2x2):
接下来是对每个像素中的所有采样点的结果进行平均:
最后就能得到平均后的结果:
对于 MSAA,我们需要知道如下几点:
MSAA 是抗锯齿操作的第一步,也就是模糊操作(求平均)。
MSAA 增加采样点,并不是为了提高采样率(分辨率没有提高),而是为了得到一个更合理的三角形覆盖率。
MSAA 的代价是计算量大增,如果一个像素里面有4个采样点,那么计算量就大了 4 倍;如果一个像素里面有 16 个采样点,那么计算量就大了 16 倍。(事实上,工业界会会复用、优化这些采样点,因此计算量并没有增加太多)。
画家算法
当我们要在屏幕上绘制物体的时候,会涉及到物体与物体间的遮挡问题。最常见的做法是像画家绘画那样,先绘制远处的物体,再绘制近处的物体。
画家算法要求我们先在深度上进行一次排序(需要 $ nlogn $ 的时间),然后再进行绘制。但有些情况是无法通过画家算法来解决的,如下图:
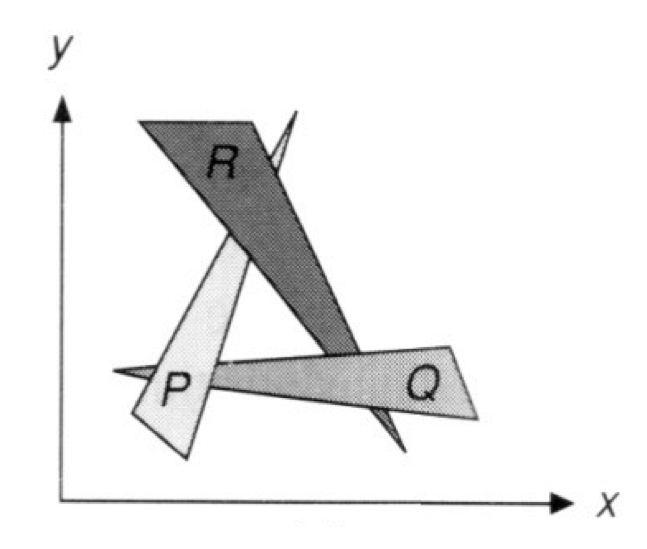
这个例子中,无论怎么排序,都无法得到上图的结果。
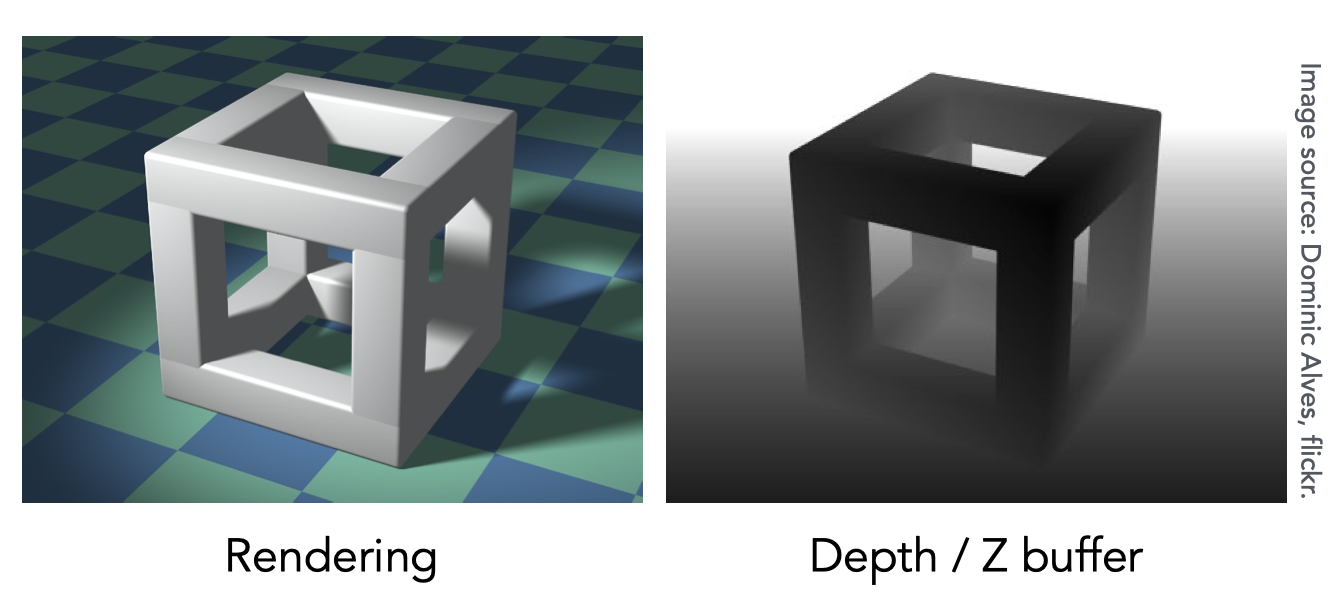
深度缓冲 (Z-Buffer)
深度缓冲用来记录每个像素的最小深度。
它的工作原理是:每次渲染的时候除了生成最终的图像之外,还生成一张深度图,该深度图记录了每个像素当前的最小深度。
具体实现步骤如下:
- 初始化所有像素的深度为 $ \infty $
在光栅化过程中,不断更新其深度:
1
2
3
4
5
6
|
for (each triangle T)
for (each sample(x,y,z) in T)
if (z < zbuffer[x,y]) {
framebuffer[x,y] = rgb;
zbuffer[x,y] = z;
}
|
对于 n 个三角形,要得到某个像素的最小深度值,我们只需要遍历所有三角形即可,因此其复杂度为 $ O(n) $。
深度缓冲还有以下的好处:
- 绘制三角形的顺序不影响最终结果
- 所有 GPU 都支持深度测试
需要注意的是:深度缓冲并不能处理透明物体。
作业
基础
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
|
static bool insideTriangle(int x, int y, const Vector3f* _v)
{
Eigen::Vector3f p0 = _v[0];
Eigen::Vector3f p1 = _v[1];
Eigen::Vector3f p2 = _v[2];
Eigen::Vector3f q(x, y, 0);
Eigen::Vector3f p0p1 = p1 - p0;
Eigen::Vector3f p1p2 = p2 - p1;
Eigen::Vector3f p2p0 = p0 - p2;;
Eigen::Vector3f p0q = q - p0;
Eigen::Vector3f p1q = q - p1;
Eigen::Vector3f p2q = q - p2;
Eigen::Vector3f r0 = p0p1.cross(p0q);
Eigen::Vector3f r1 = p1p2.cross(p1q);
Eigen::Vector3f r2 = p2p0.cross(p2q);
return (r0.z() > 0 && r1.z() > 0 && r2.z() > 0) || (r0.z() < 0 && r1.z() < 0 && r2.z() < 0);
}
void rst::rasterizer::rasterize_triangle(const Triangle& t) {
auto v = t.toVector4();
int top = ceil(std::max(v[0].y(), std::max(v[1].y(), v[2].y())));
int bottom = floor(std::min(v[0].y(), std::min(v[1].y(), v[2].y())));
int left = floor(std::min(v[0].x(), std::min(v[1].x(), v[2].x())));
int right = ceil(std::max(v[0].x(), std::max(v[1].x(), v[2].x())));
for (int x = left; x < right; x++) {
for (int y = bottom; y < top; y++) {
if (insideTriangle(x, y, t.v)) {
auto[alpha, beta, gamma] = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
Eigen::Vector3f point(x, y, 0.0);
auto ind = (height-1-point.y())*width + point.x();
if (depth_buf[ind] > z_interpolated) {
depth_buf[ind] = z_interpolated;
set_pixel(point, t.getColor());
}
}
}
}
}
|
提高
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
|
static bool insideTriangle(float x, float y, const Vector3f* _v)
{
Eigen::Vector3f p0 = _v[0];
Eigen::Vector3f p1 = _v[1];
Eigen::Vector3f p2 = _v[2];
Eigen::Vector3f q(x, y, 0);
Eigen::Vector3f p0p1 = p1 - p0;
Eigen::Vector3f p1p2 = p2 - p1;
Eigen::Vector3f p2p0 = p0 - p2;;
Eigen::Vector3f p0q = q - p0;
Eigen::Vector3f p1q = q - p1;
Eigen::Vector3f p2q = q - p2;
Eigen::Vector3f r0 = p0p1.cross(p0q);
Eigen::Vector3f r1 = p1p2.cross(p1q);
Eigen::Vector3f r2 = p2p0.cross(p2q);
return (r0.z() > 0 && r1.z() > 0 && r2.z() > 0) || (r0.z() < 0 && r1.z() < 0 && r2.z() < 0);
}
//Screen space rasterization
void rst::rasterizer::rasterize_triangle(const Triangle& t) {
auto v = t.toVector4();
int top = ceil(std::max(v[0].y(), std::max(v[1].y(), v[2].y())));
int bottom = floor(std::min(v[0].y(), std::min(v[1].y(), v[2].y())));
int left = floor(std::min(v[0].x(), std::min(v[1].x(), v[2].x())));
int right = ceil(std::max(v[0].x(), std::max(v[1].x(), v[2].x())));
float sub_pixels[4][2] = {
{ 0.0, 0.0 },
{ 0.5, 0.0 },
{ 0.0, 0.5 },
{ 0.5, 0.5 }
};
int sub_pixels_length = sizeof(sub_pixels) / sizeof(sub_pixels[0]);
for (int x = left; x < right; x++) {
for (int y = bottom; y < top; y++) {
float pass = 0.0;
for (int i = 0; i < sub_pixels_length; i++) {
if (insideTriangle(x + sub_pixels[i][0], y + sub_pixels[i][1], t.v)) {
pass += 1;
}
}
// NOTE: percent MUST be float, make sure pass or sub_pixels_length is float.
float percent = pass / sub_pixels_length;
if (pass > 0) {
auto[alpha, beta, gamma] = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
Eigen::Vector3f color = t.getColor();
Eigen::Vector3f point(x, y, 0.0);
auto ind = (height-1-point.y())*width + point.x();
if (depth_buf[ind] > z_interpolated) {
depth_buf[ind] = z_interpolated;
color *= percent;
set_pixel(point, color);
}
}
}
}
}
|
参考资料
Lecture 05 Rasterization 1 (Triangles)
Lecture 06 Rasterization 2 (Antialiasing and Z-Buffering)
Lecture 07 Shading 1 (Illumination, Shading and
Graphics Pipeline)